Real-Time Computing in Industrial Automation: What It Means in Practice

Table of Contents
What Real-Time Actually Means
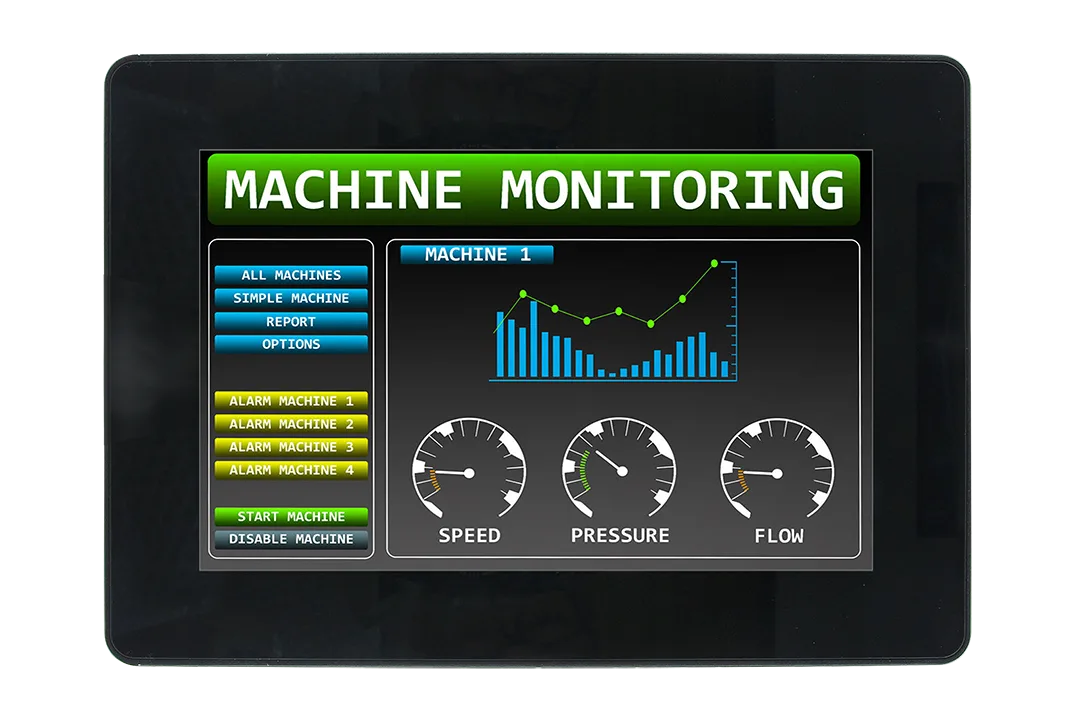
In industrial automation, real-time does not mean "very fast" — it means deterministic. A real-time system guarantees that a task will execute within a specified time window — every time, without exception. A servo control loop running at 1ms cycle time must receive its position command exactly every 1ms ±10 microseconds, regardless of other system activity.
Hard Real-Time vs Soft Real-Time
- Hard real-time — missing a deadline is a system failure with physical consequences (motor over-speed, collision, unsafe condition). Requires a certified RTOS.
- Soft real-time — occasional deadline misses cause degraded performance but not safety failures. SCADA data updates, HMI refreshes, and data logging are soft real-time tasks.
Windows Is Not Real-Time
Standard Windows (even Windows 10 IoT) is not a real-time OS. Background processes — antivirus scans, OS updates, driver interrupts — can delay task execution by tens of milliseconds. For motion control and safety PLC applications, a dedicated RTOS (VxWorks, QNX, or Linux with PREEMPT_RT patch) is required for the control layer, with Windows handling only the HMI and data presentation layer.
EtherCAT and Real-Time Fieldbus
EtherCAT achieves 31.25-microsecond deterministic cycle times over standard Ethernet hardware — enabling PC-based soft motion controllers to achieve hard real-time servo control without a dedicated DSP. EtherCAT master software (TwinCAT, CODESYS, etc.) runs in the real-time partition of a PC-based control system, with Windows or Linux providing the operator HMI layer.
Frequently Asked Questions
TSL Automation Solutions
Head of Marketing, TSL Automation Solutions
Sanjana covers industrial automation trends, product launches, and technology insights for TSL Automation Solutions, a Mumbai-based distributor of HMI, Panel PC, and embedded computing systems serving manufacturers across India and globally.
Need help choosing the right product?
Our team in Mumbai can recommend the right HMI, Panel PC, or embedded system for your application.
Contact TSL Automation